


MVシリーズの動作確認方法の紹介
1. 概要

MVシリーズは、メーカーでの生産が終了している機種です。私たち「保守部品.com」は、生産終了したFA部品の取り扱いに特化していますので、あえてこの機種を選んで動作確認の内容をご紹介しています。
2. パラメータの読み書きの確認
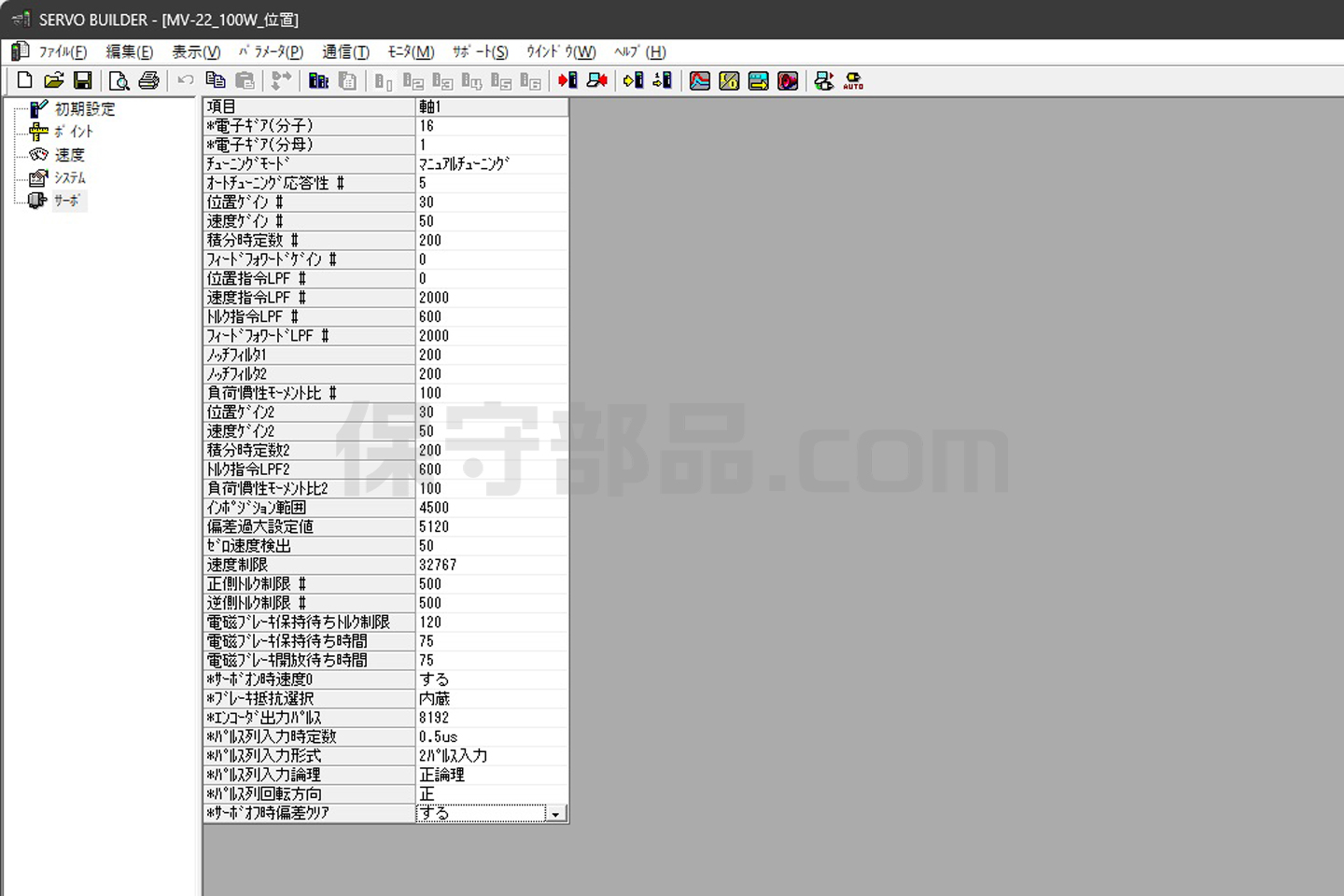

パラメータの設定には、MVシリーズ専用のパラメータ設定・モニタソフト「SERVO BUILDER」を使用し、パラメータの読み書きが正常に行えることを確認しています。また、パラメータの初期化はアクセスウィンドウから行い、モニタや操作キー、表示灯が正常に機能しているかも確認しています。
サーボアンプにパラメータを書き込む際、SERVO BUILDERのデータ送信が完了しても、少しの間サーボアンプのモニタは「データ受信中」となっています。この間に電源の再投入を行ってしまうと、パラメータが正常に適用されない可能性がありますので、モニタの状態も確認した後に電源の再投入を行うと良いでしょう。
3. 各種制御信号(I/O)の確認
当社では、アンプにモータを接続し、正確な位置決め動作ができることを確認するだけではなく、サーボモータを制御する上で必要な全ての入力信号を、当社で製作したツールを用いて検査しております。中でもEMG(非常停止)、CCW_LS(正転側リミットスイッチ)、CW_LS(逆転側リミットスイッチ)の機能は、作業者の安全確保や機器の破損防止を目的として使われることが多い機能ですので、この検査は絶対に欠かせません。
MVシリーズの制御入力回路には、両方向入力対応のフォトカプラが使用されています。入力コモン(COM0)の極性を入れ替えることで、フォトカプラ内で並列に接続されているLEDが、両方とも機能しているか確認しています。出力に関しても、ソフトウェアの強制出力機能を使用し、各ピンに接続されたLEDがすべて点灯するか確認しています。
確認を行っている入出力コネクタの機能は下記の通りです。
| 非常停止 | :([EMG][1]) |
| CCWリミットスイッチ | :(CCW_LS[2]) |
| CWリミットスイッチ | :(CW_LS[3]) |
| アラームリセット | :(RESET[4]) |
| サーボオン | :(SVON[5]) |
| 運転開始指令 | :(START[6]) |
| 原点復帰指令 | :(ORG[7]) |
| JOG運転指令 | :(JOG[8]) |
| ティーチング指令 | :(TEACH[9]) |
| ゲイン切替 | :(GAIN[10]) |
| データ0 | :(データ0[11]) |
| データ1 | :(データ1[12]) |
| データ2 | :(データ2[13]) |
| データ3 | :(データ3[14]) |
| データ4 | :(データ4[15]) |
| Mコードオフ指令 | :(MOFF[16]) |
| 原点センサ | :(ORGS[17]) |
| 停止センサ | :(STOP[18]) |
| 待機解除指令 | :(RESUM[19]) |
| 停外部ブレーキ抵抗過熱 | :(BOH[20]) |
| アラーム | :(ALARM[24]) |
| 位置決め完了 | :(MOVE[26]) |
| Mコード出力中 | :(MCODE[27]) |
| Mコード0 | :(M0[28]) |
| Mコード1 | :(M1[29]) |
| Mコード2 | :(M2[30]) |
| Mコード3 | :(M3[31]) |
| Mコード4 | :(M4[32]) |
| 電磁ブレーキタイミング | :(BRAKE[33]) |
| 運転準備完了 | :(RDY[34]) |
4. 位置決め動作の確認
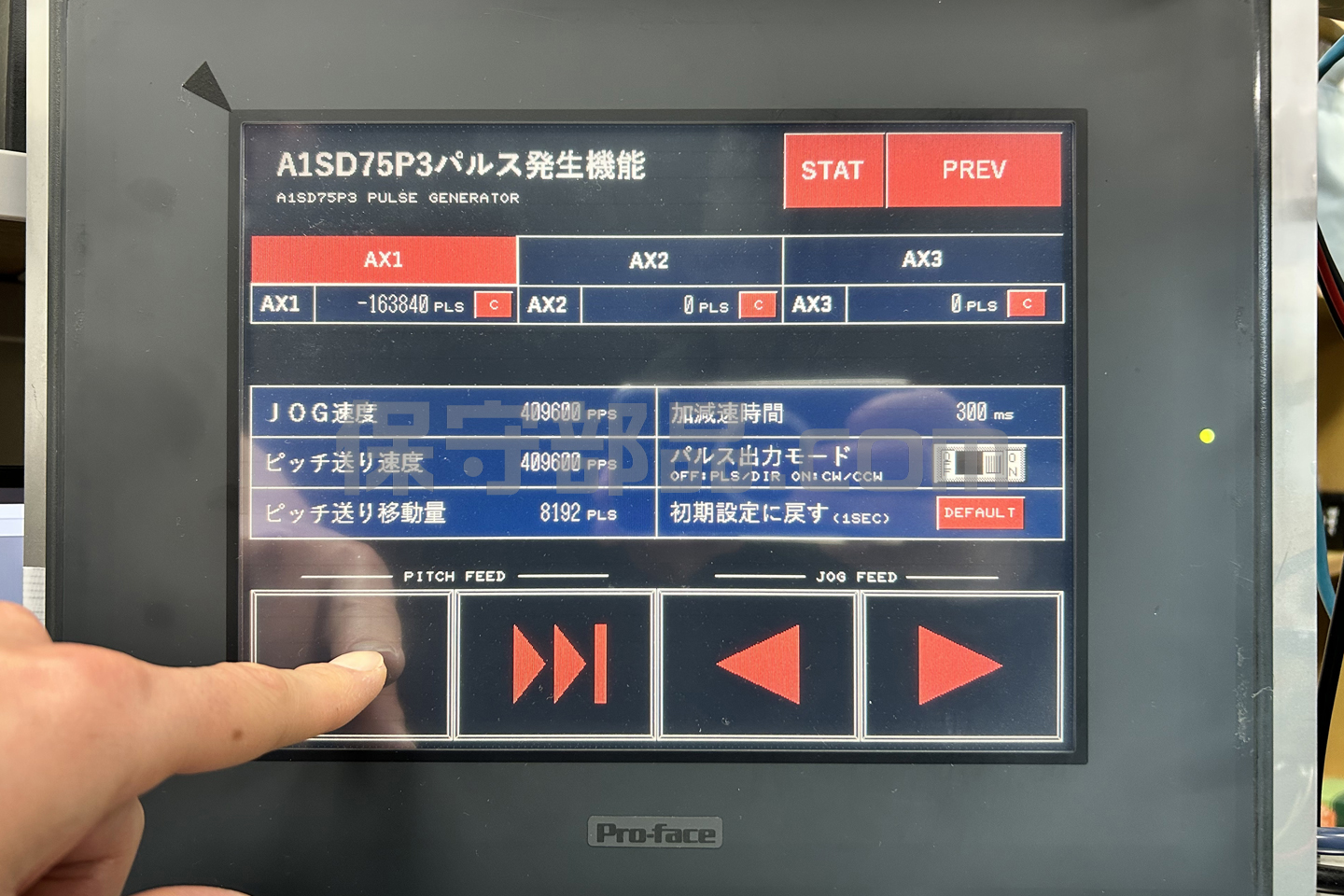
MVシリーズは、パルス列入力に対応したアンプです。パルス列入力による位置決め動作の確認は、当社で独自開発した動作確認ソフトウェアの「A1SD75P3パルス発生機能」という機能を使って行います。「ピッチ送り移動量」の設定を、サーボモータのエンコーダーの1回転あたりの分解能と同じ数値に設定し、正転、及び、逆転方向にそれぞれピッチ送りを何度も繰り返し行うことで、正確な位置決め動作ができることを確認しています。
パルス列入力回路の確認をより確実なものとするため、A1SD75P3から出力するパルスは、「パルス列+符号」方式ではなく、「正転/逆転」方式としています。それに合わせてMVシリーズの設定も、「パルス列入力形式」を「2パルス入力」方式で受け取るようにしています。こうすることで、アンプ内部のパルス列入力用のフォトカプラの2つが、高速パルスを正常に受け取ることをより確実に確認することができます。

さらに回転数計を使用し、設定したモータの回転速度と実際の回転速度が一致するかの確認も行っています。
5. PLCシリアルコネクタの確認
MVシリーズは、PLCとのダイレクトリンクに対応したサーボアンプです。位置決めユニットを介さずとも、CPUユニットから位置決め運転を行うことができます。
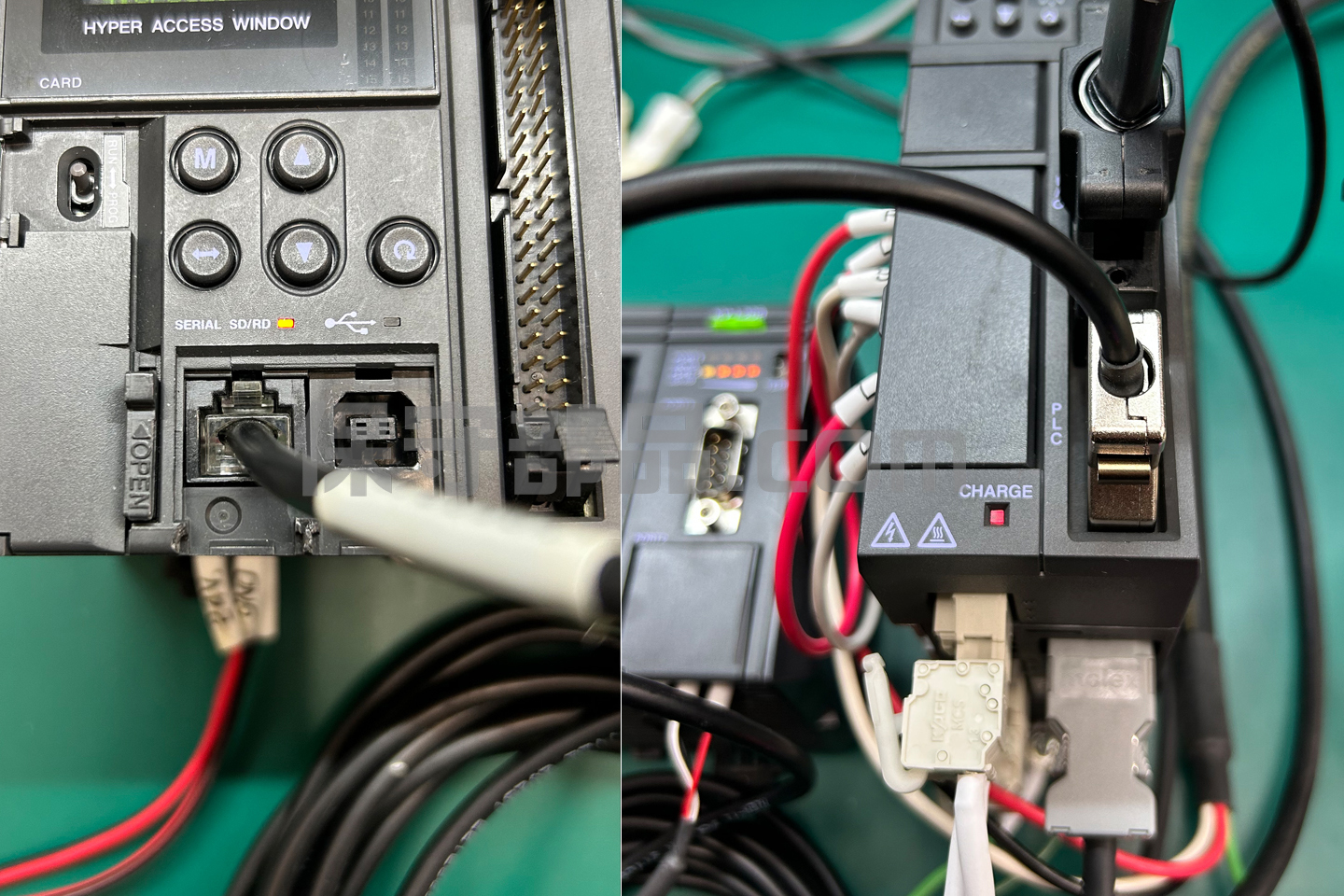
当社では、サーボアンプとキーエンスのシリアル内蔵CPUユニット「KV-1000」をシリアル通信で接続し、JOG運転を行うことで、サーボアンプのPLCシリアルコネクタが正常に機能していることを確認しています。また、位置決め動作の確認と同様に、JOG運転中に回転数計を使用し、現在速度と実際の回転速度が一致することも確認しています。
6. バス接続の確認
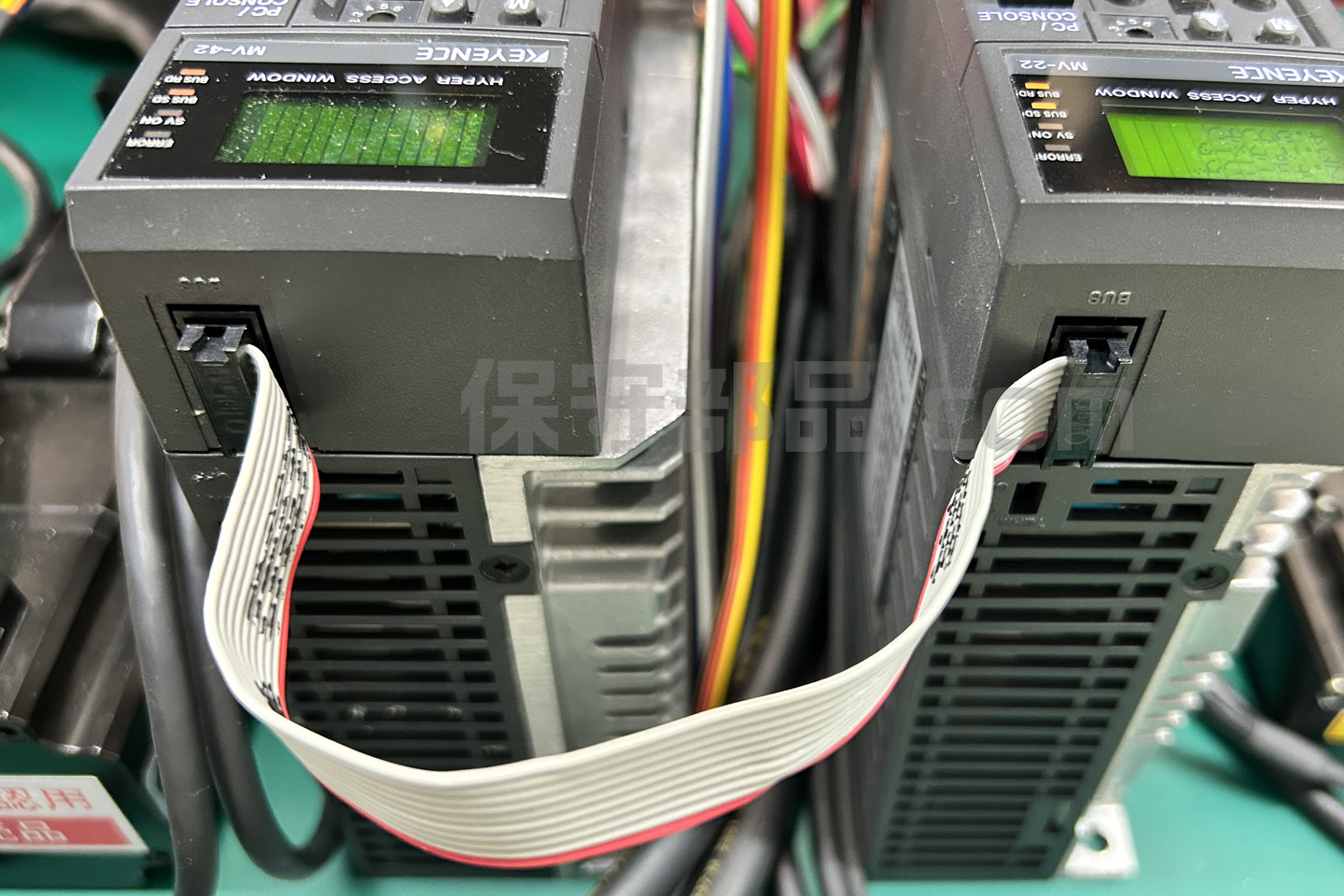
MVシリーズは、増設が可能なサーボアンプです。オプションのバス接続ケーブルを使用することで、最大6軸まで増設できます。動作確認の際は、主軸ユニットであるMV-42を接続していますが、主軸ユニットもユニットNo.スイッチを変更することにより、増設ユニットとして使用することができます。バス接続を行う際も、パラメータの読み書きが正常に行えることを確認します。
当社では、各軸をJOG運転することで、通信が正常に行われることを確認しています。また、JOG運転中に回転数計を使用し、現在速度と実際の回転速度が一致するかの確認も行っています。
7. 動作確認ツールの紹介
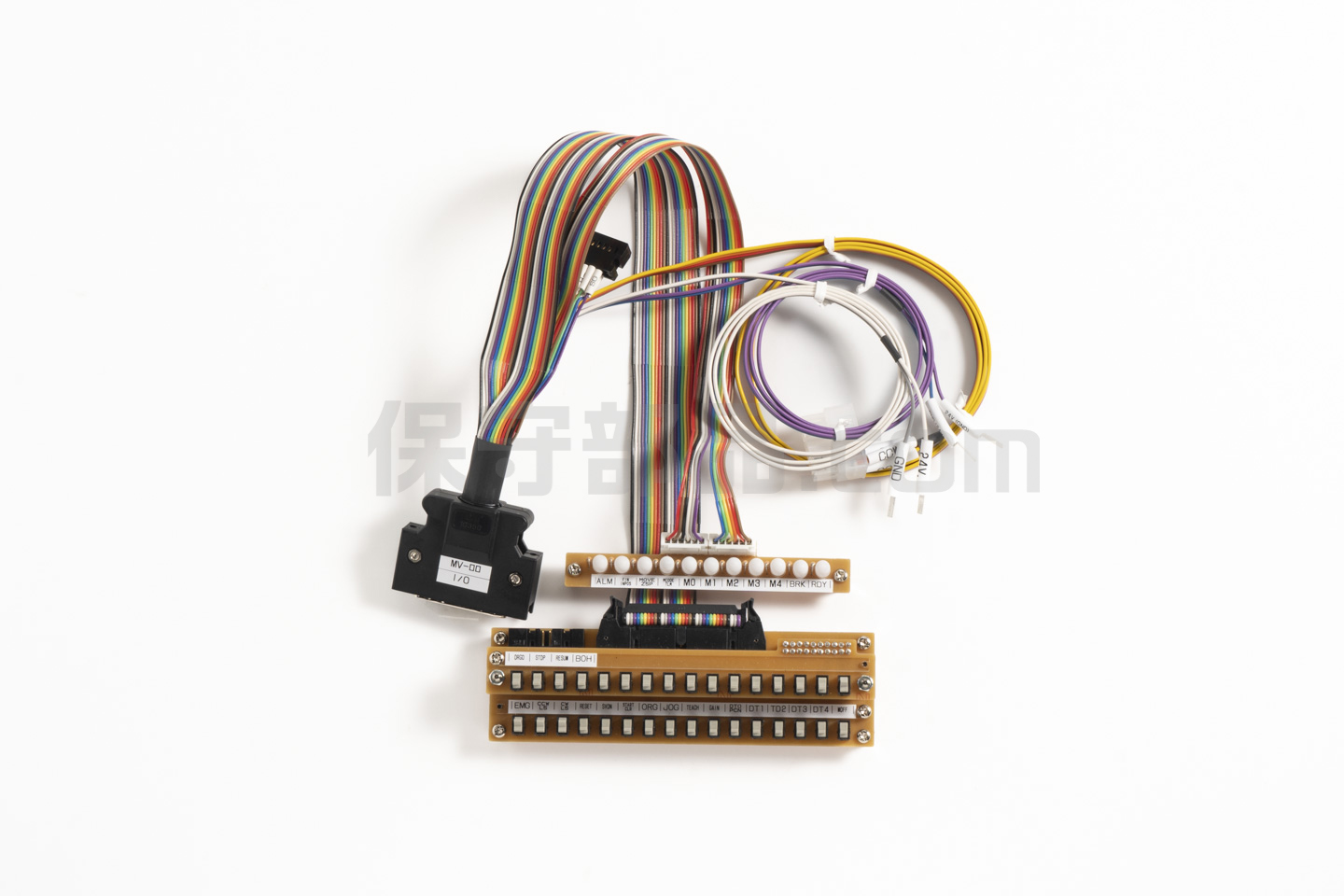
当社では、製品ごとに動作確認ツールを開発し、迅速かつ正確な動作確認を行っています。入力信号の確認には、スイッチにより32点の入力が可能な基板を製作しました。基板とケーブルの接続にコネクタを使用することで、インバータやスピードコントローラなど、他の製品の動作確認にも利用できるように、汎用性を高めました。
こちらはツールを製作しているときの様子です。
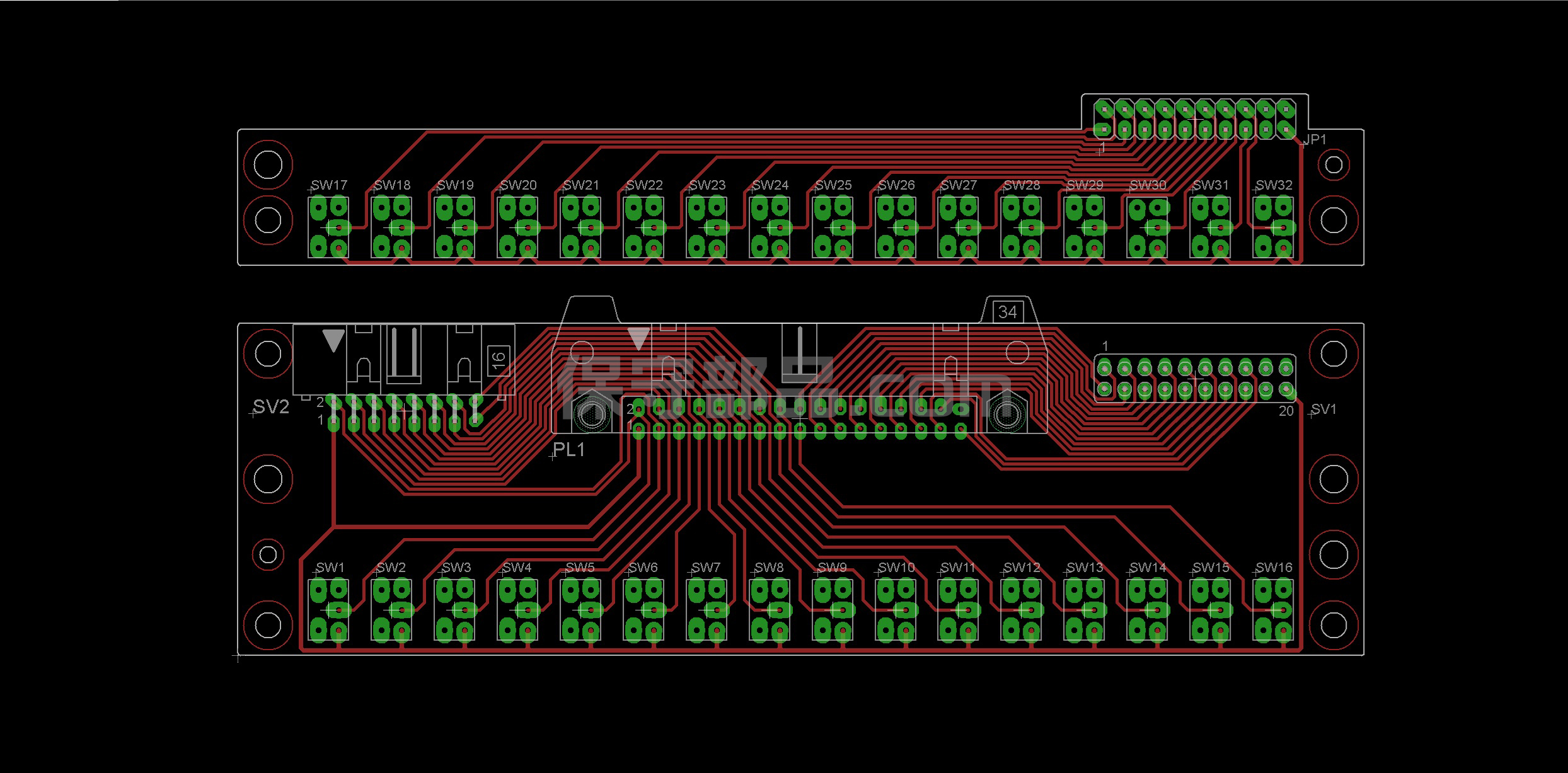
こちらは動作確認ツールの基板のパターン図です。
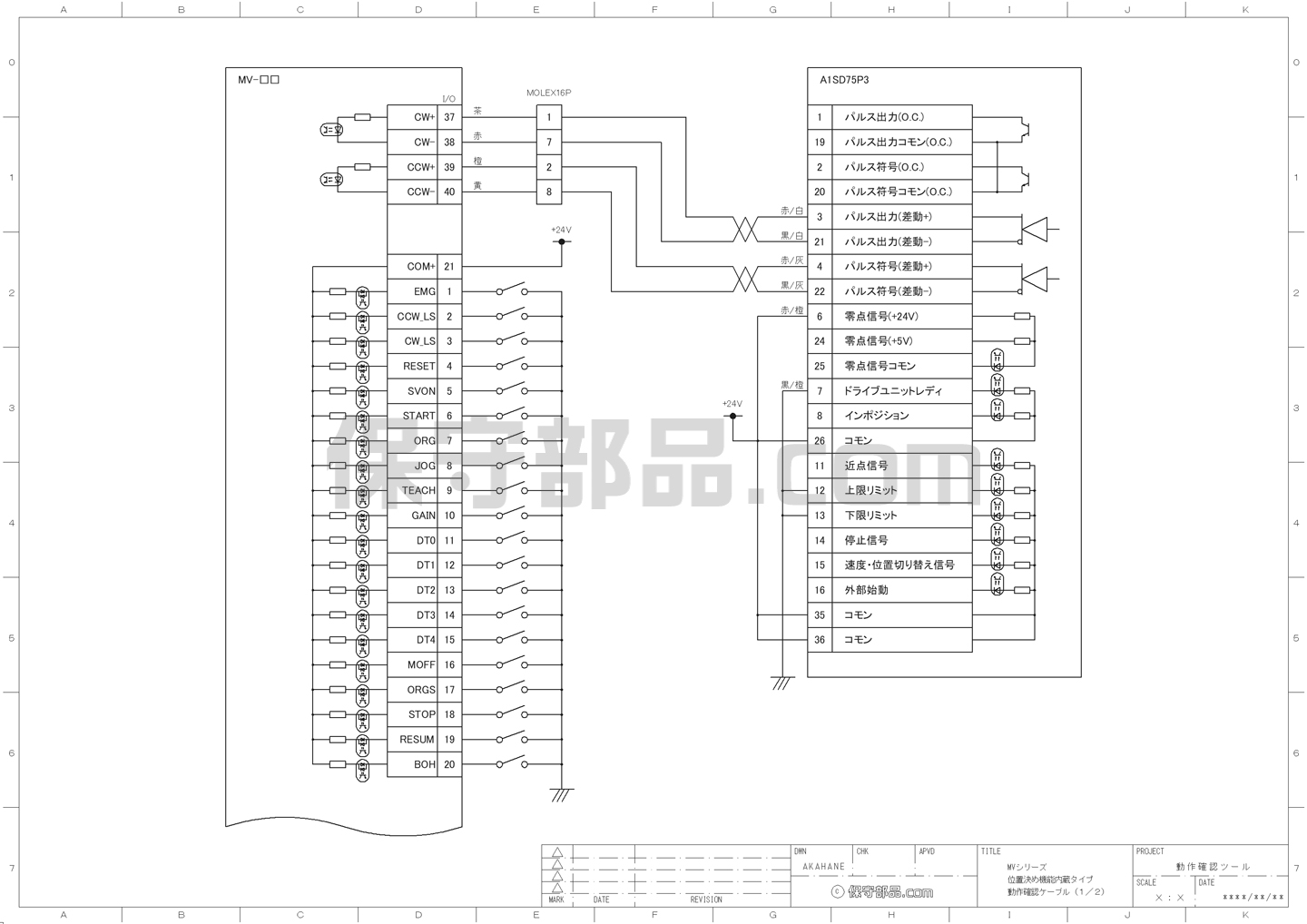
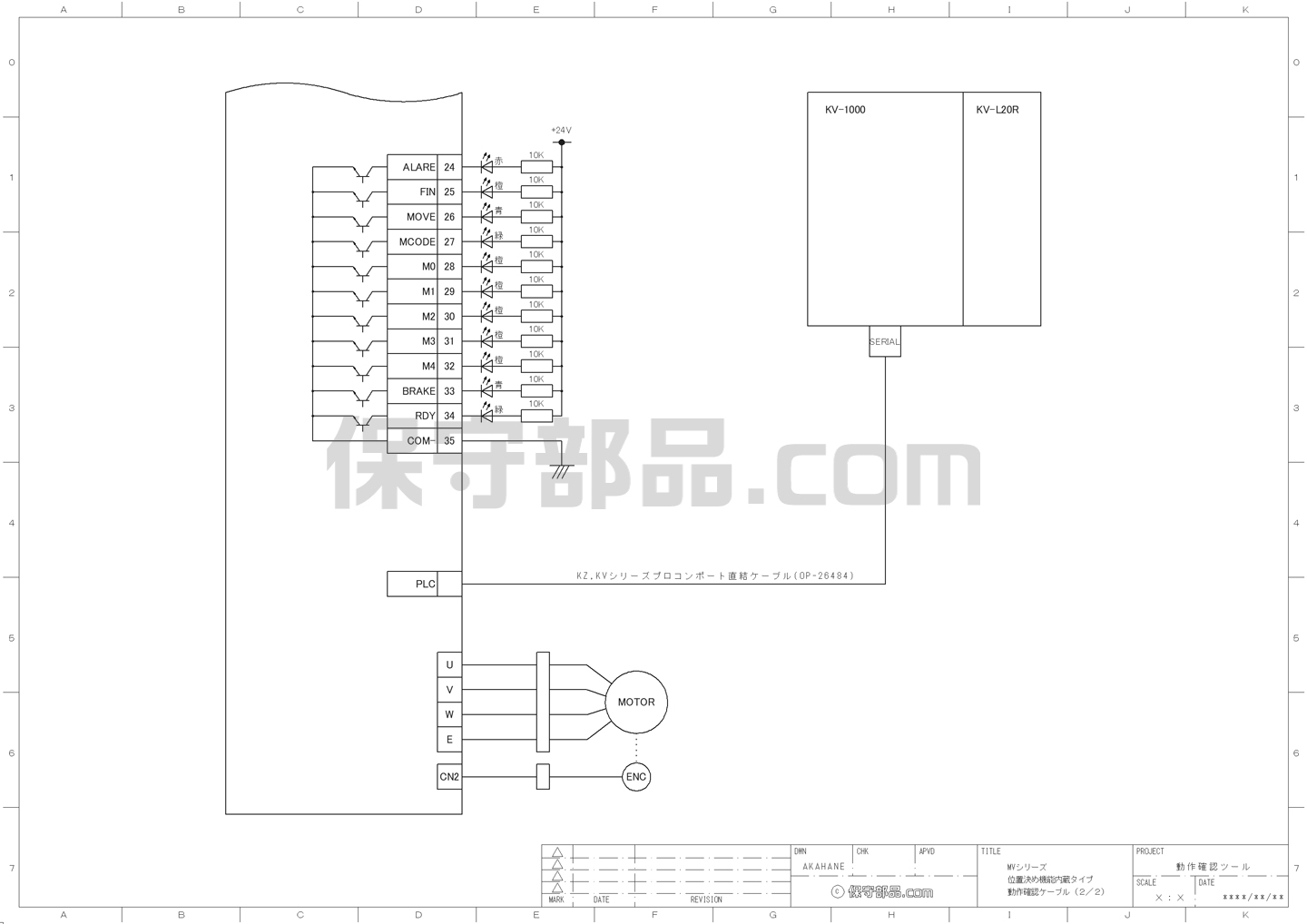
こちらは「4. 位置決め動作の確認」「5. PLCシリアルコネクタの確認」で紹介した動作確認の配線図です。
8. 当社で動作確認可能なMVシリーズの一覧表
MVシリーズのサーボアンプはもちろんですが、サーボモータも動作確認が可能です。対応可能な機種は下記の通りです。
| サーボアンプ | サーボモータ | |
|---|---|---|
| 200V | MV-22 MV-42 MV-72 |
MV-M05(D) MV-B05(D) MV-M10(D) MV-B10(D) MV-M20(K) MV-B20(K) MV-M40(K) MV-B40(K) MV-M75(K) MV-B75(K) |
| 100V | MV-21 MV-41 |
MV-M05(D) MV-B05(D) MV-M10(D) MV-B10(D) MV-M20(K) MV-B20(K) MV-M40(K) MV-B40(K) |
200V
| MV-22 MV-42 MV-72 |
MV-M05(D) MV-B05(D) MV-M10(D) MV-B10(D) MV-M20(K) MV-B20(K) MV-M40(K) MV-B40(K) MV-M75(K) MV-B75(K) |
|---|
100V
| MV-21 MV-41 |
MV-M05(D) MV-B05(D) MV-M10(D) MV-B10(D) MV-M20(K) MV-B20(K) MV-M40(K) MV-B40(K) |
|---|
特殊仕様のアンプはオークションサイトでよく見かけます。もし、そのようなアンプをご購入なさった場合は、自由にパラメータの変更ができない場合がありますので注意が必要です。
私たち保守部品.comの使命は、確実に動作するFA部品をお届けすることで皆様の生産設備を守ることです。今後も動作確認に力を入れ、お客様が安心してご利用いただけるよう最大限の努力をしてまいります。

